


EV-100/SPX-5 Tiller Drive Replacement set
€ 365,00 incl. btw
Uitverkocht als alternatief kunt u de Raymarine set aanschaffen!
Uitverkocht
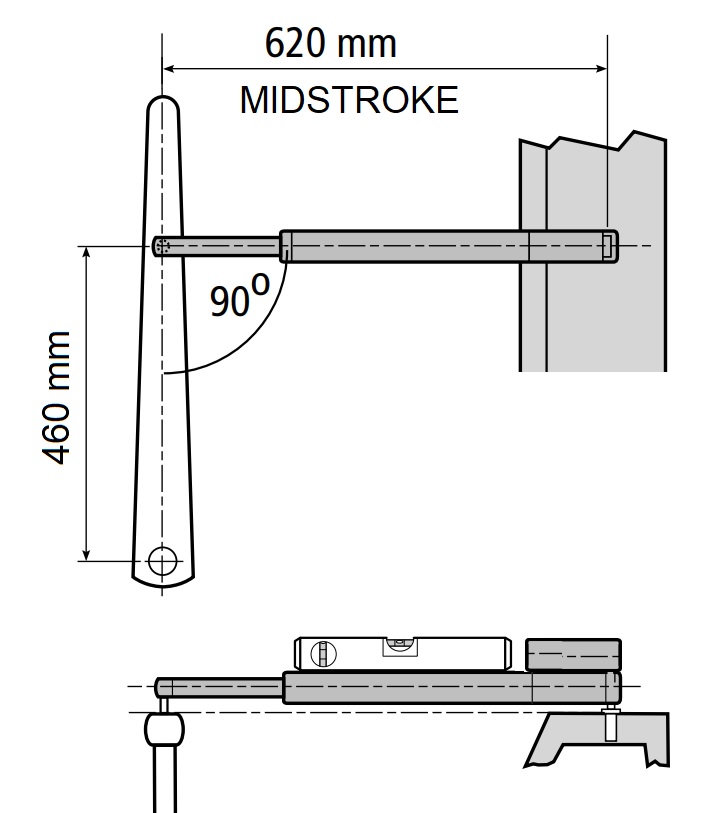
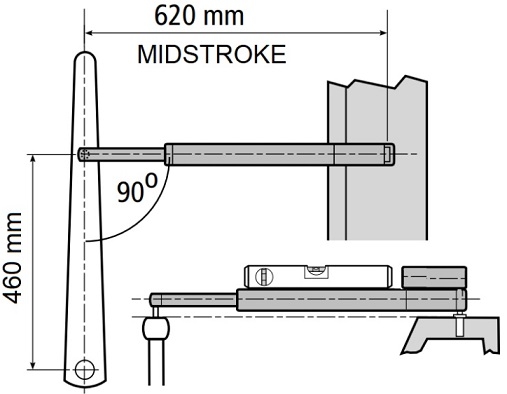
Midstroke
De midstroke is de afstand tussen de Tillerpin en Messing bus met het roer in het midden.
Met de Easy Drive zonder rudder feedback is een minimale midstroke mogelijk van 570mm, met rudder feedback minimaal 600mm, maximaal 900mm
De duwstang verlengstukken van Raymarine en Simrad passen niet op de Pcnautic drive
De Raymarine Q047 drive (ST4000/SPX5/S1/EV-100) heeft standaard zonder verlenging een midstroke van 620mm
De Simrad TP10, TP22 en TP32 hebben standaard zonder verlenging een midstroke van 595mm
De Raymarine ST1000 en ST2000 hebben standaard zonder verlenging een midstroke van 589mm
Connector drive
U heeft de keuze uit een rechte connector of haakse connector aan de drive.
De Offshore en Pro Tiller Pilot wordt geleverd met voorgemonteerde 5 polige soldeer stekkers.
Bij de Easy Tiller Pilot worden alleen de rechte 2 polige schroefconnectoren los bijgeleverd.
De Raymarine Tiller Drive Replacement set wordt met 5 polige soldeer stekkers voorgemonteerd geleverd.
Lengte drive kabel
De kabellengte aan de drive kan samen met de kabellengte van de socket naar de MotorController of montagedoos in totaal niet langer zijn dan 1,95 meter.
Connector socket
U heeft de keuze uit een rechte connector of haakse uitvoering.
De haakse uitvoering is geschikt voor een maxiamale huiddikte van 10mm
De Offshore en Pro Tiller Pilot wordt geleverd met voorgemonteerde 5 polige soldeer stekkers.
Bij de Easy Tiller Pilot worden alleen de rechte 2 polige schroefconnectoren los bijgeleverd.
De Raymarine Tiller Drive Replacement set wordt met 5 polige soldeer stekkers voorgemonteerd geleverd.
Lengte socket cable
De kabellengte aan de drive kan samen met de kabellengte van de socket naar de MotorController of montagedoos in totaal niet langer zijn dan 1,95 meter.
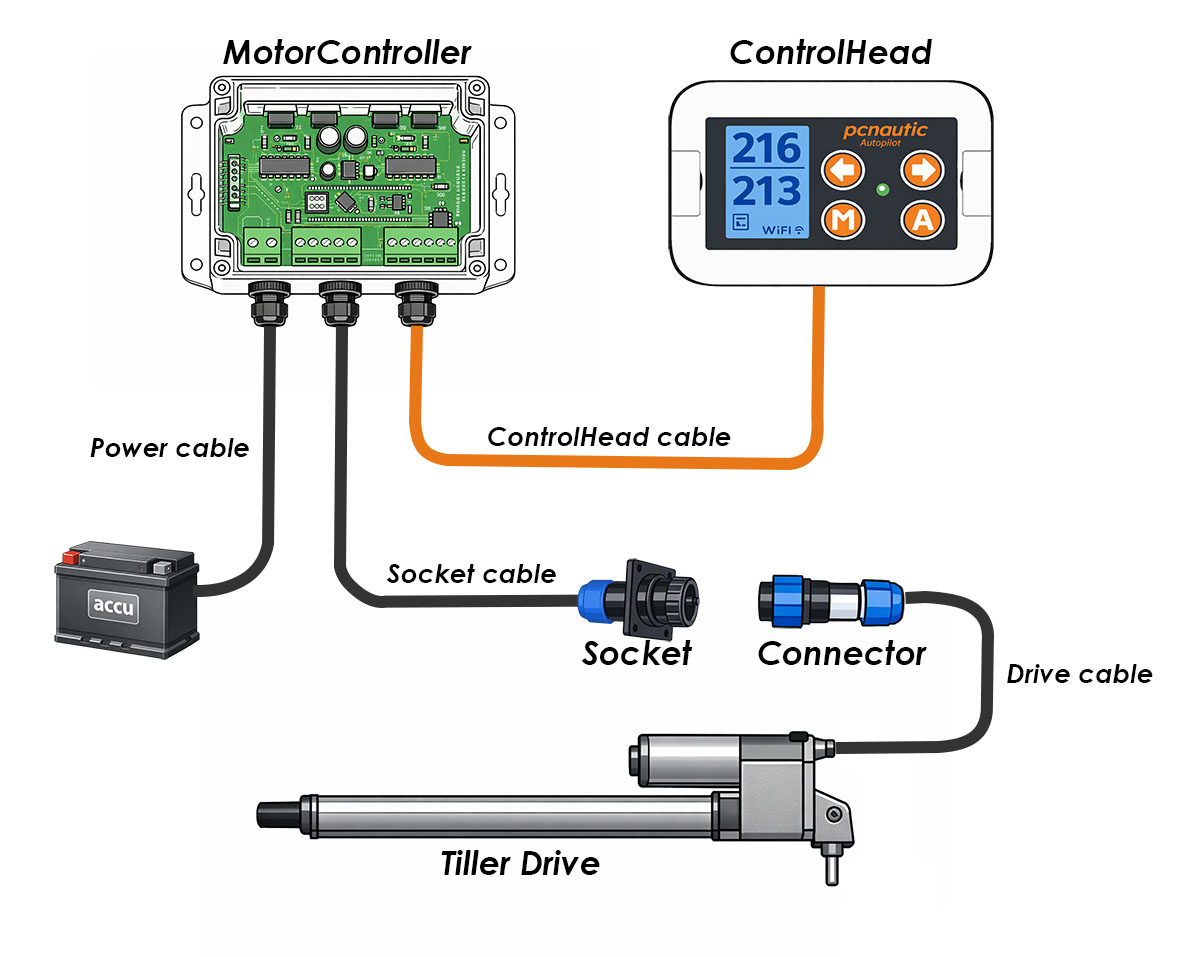
Lengte controlhead cable
Info lengte controlhead kabel
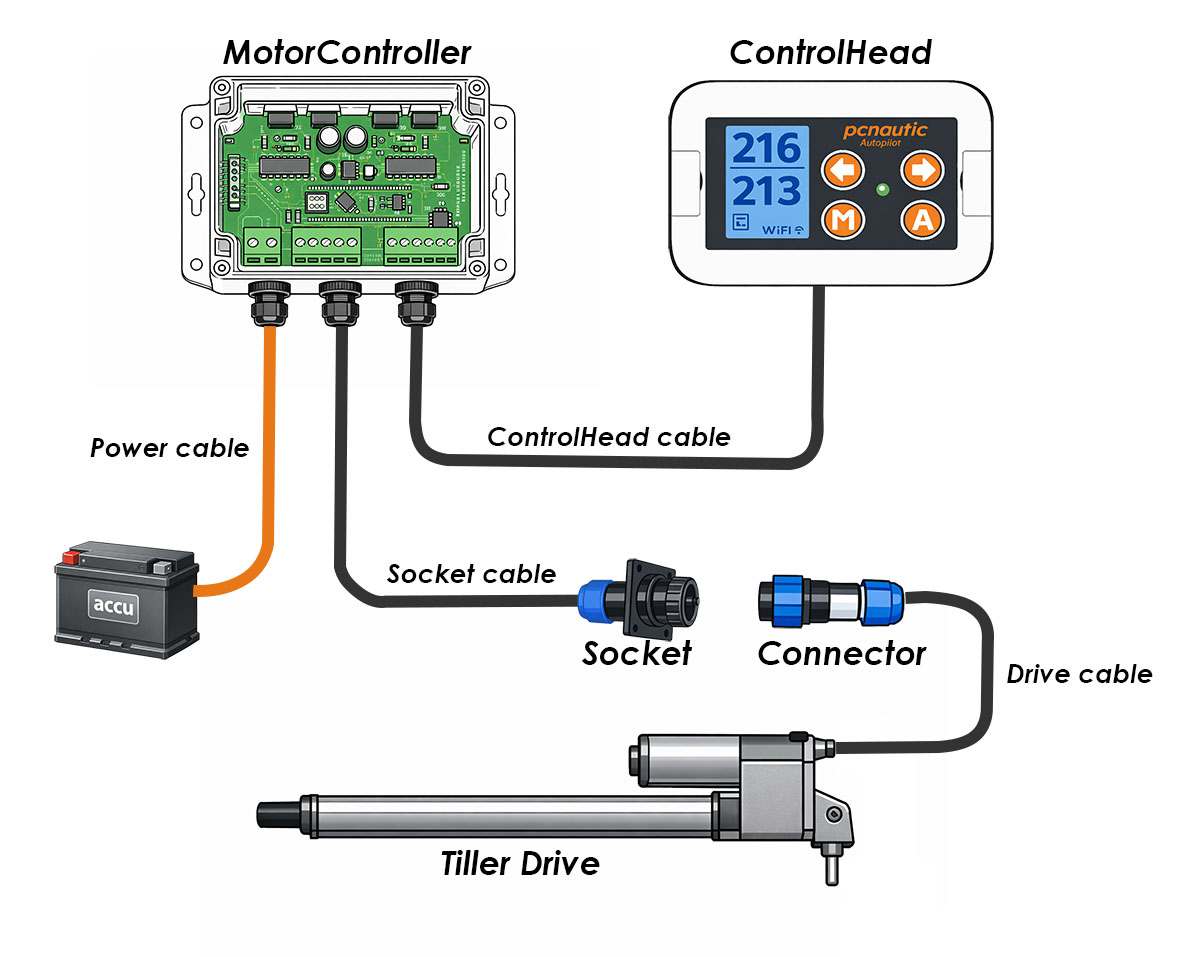
Lengte voedingskabel
Info lengte voedingskabel
Beschrijving
Uitverkocht als alternatief kunt u de Raymarine set aanschaffen!
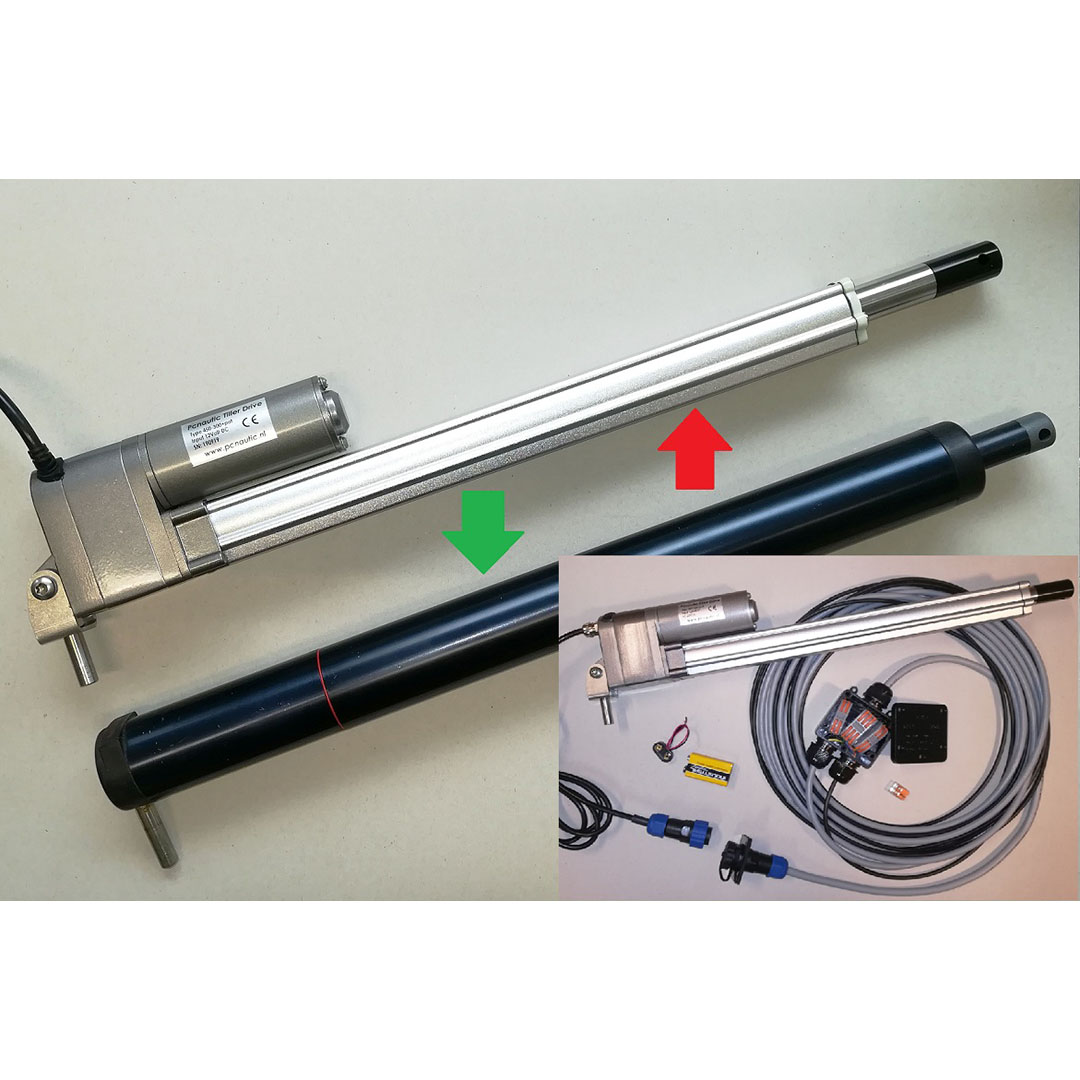
Met de Pcnautic 620 Tiller Drive kunt u 1 op 1 uw oude Raymarine Q047 Tiller Drive vervangen.
Complete installatie en kalibratie set voor de Raymarine EV-100 of SPX-5 Autopilots.
Het grootste voordeel van de Pcnautic Tiller Drive is de interne roerstandmeter, die kan worden aangesloten op uw stuurcomputer.
Hierdoor kan uw Autopilot veel beter reageren op de omstandigheden.
Zie de reviews!
Extra voordelen:
– De Pcnautic Tiller Drive is voorzien van End Switches, die voorkomen dat de motor doorbrandt in de uiterste standen.
– Een langere slag / Stroke van 300mm i.p.v. de 250mm van Raymarine.
– Geen vrijloop, daardoor is er minder slijtage en stroomverbruik.
– Stiller
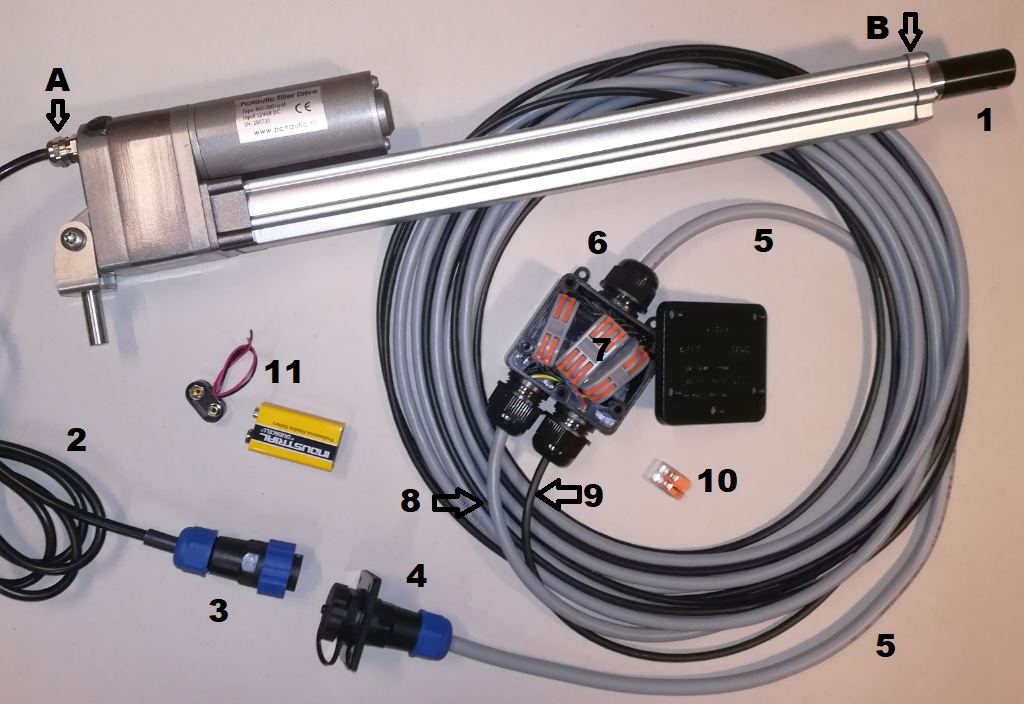
Zie afbeelding met overzicht set:
A: Met verbeterde kabeldoorvoer.
B: Versterkte en verbeterde pushrod geleider en seal.
1: Pushrod extension, met standaard middenstand van 620mm naar wens aangepast van 600 t/m 900 mm.
2: Kabellengte Tiller Drive standaard 75cm naar wens aan te passen tot max 2 meter.
3: Gemonteerde 7 polige connector (ook haaks leverbaar), intern voorzien van de benodigde weerstanden voor correcte roerstand weergave, en power verbinding voor automatische herkenning van de roerstand voor de ACU-100 of X-5 Course Computer.
4: Gemonteerde 7 polige socket, met waterdichte backside, de montageplaat heeft dezelfde afmetingen als de Raymarine 6 polige autopilot socket. Boorgat 25mm.
5: 2 meter 7x1mm2 kabel, gemonteerd aan de 7 polige socket (4) ander uiteinde open eind voor montage in doos (6).
6: Waterdichte montagedoos.
7: Kabelklemmen voor eenvoudige montage van de bedrading.
8: 5 meter 4x1mm2 kabel voor aansturing en auto power van de ACU of Course Computer voor automatische herkenning van de roerstand.
9: 5 meter afgeschermde NMEA0183 kabel voor het doorgeven van de roerstand (rudder).
10: Kabelklem voor doorlussen power van de ACU of Course Computer.
11: 9 volt batterij met leads voor eenmalige kalibratie.
Instructie video op youtube:

YouTube video de Pcnautic Tiller Drive in gebruik:

Support
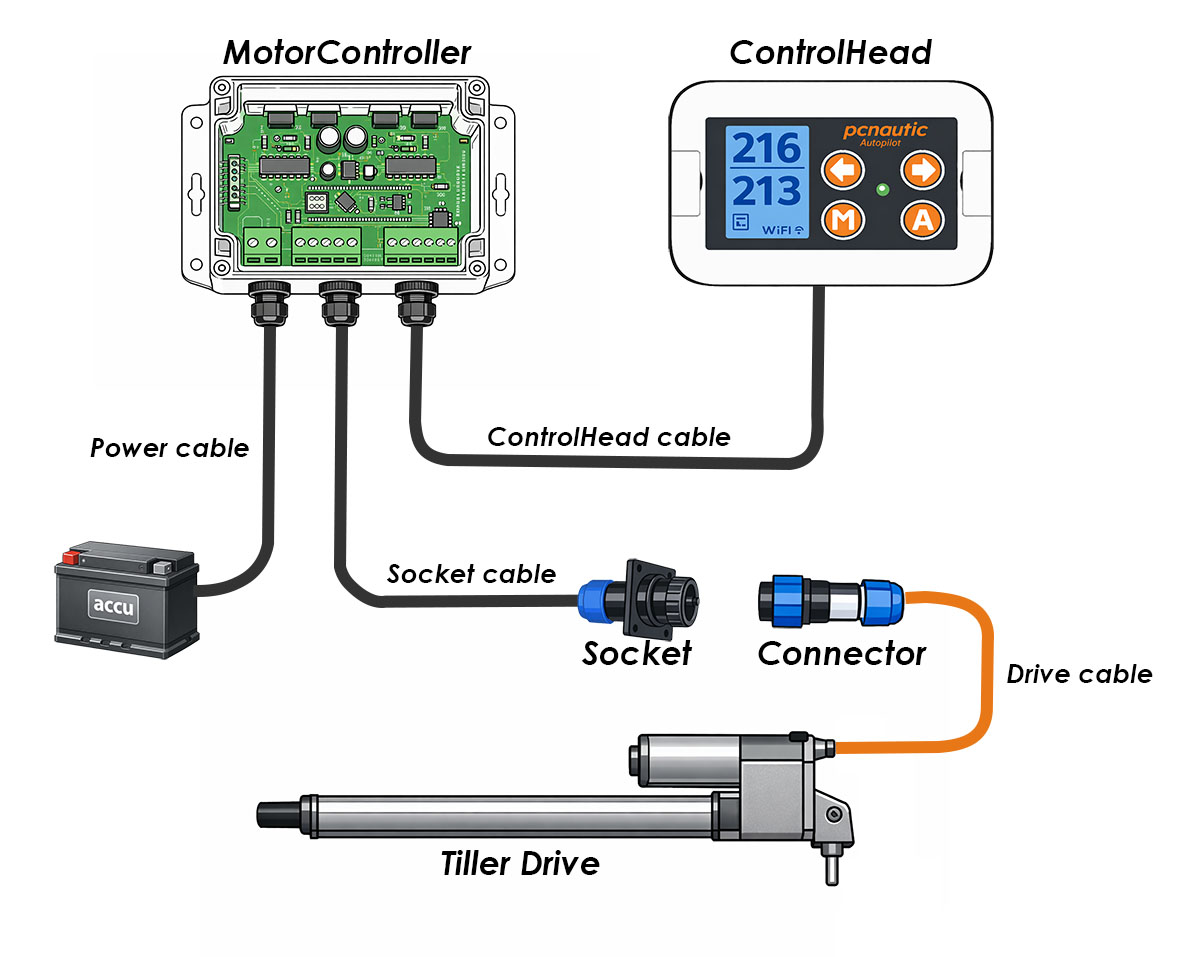
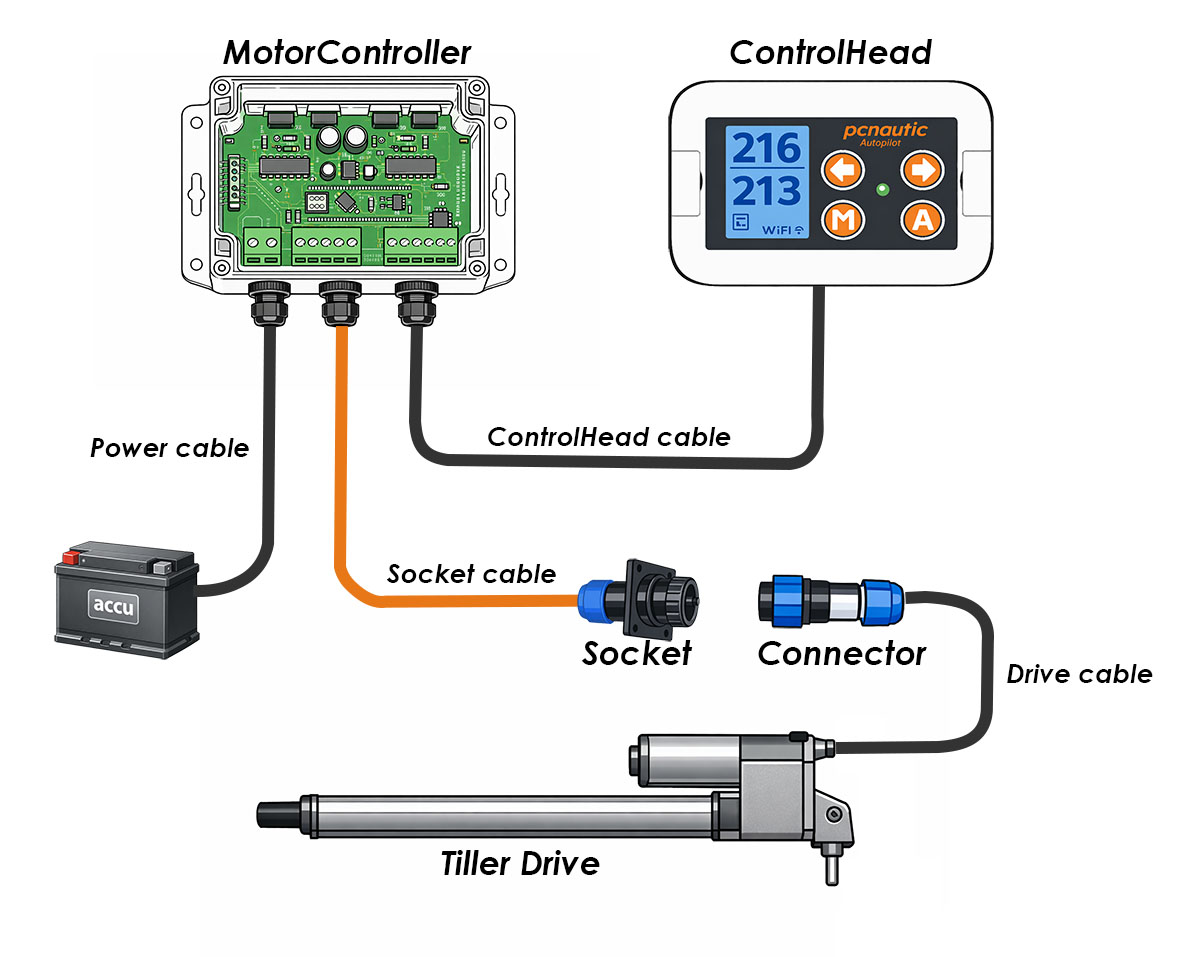
Installatie en kalibratie, zie de afbeeldingen en schema’s onder de tekst:
Instructie video op youtube:

Zie afbeelding 1
1. Kort de kabel(nr. 5) in, zodat je de verbindingsdoos(nr. 6) dichtbij de socket(nr.4) hebt, maar wel op een plek waar je er nog bij kunt. In de doos zitten handige draadclips(nr. 7), zodat de draden makkelijk met elkaar te verbinden zijn.
2: Sluit de draden aan volgens schema 1.
3: Vanaf de verbindingsdoos(nr. 6) moet je de 2 bijgeleverde kabels(nr 8 en 9) naar de ACU/SPX trekken.
4: De zwarte NMEA kabel(nr 9) is voor de roerstand. Sluit de kleuren aan volgens schema 2, die komen overeen met de kleuren op de RUDDER stekker. De afscherming moet in het grijze laatste vakje.
5: In de grijze kabel zitten 4 draden, nummer 1 sluit je aan op A van de motor en nummer 2 op B van de motor.
De min draad van de power verwijder je en plaats je in het verbindingsblokje(nr.10) samen met de geel/groene draad.
De draad met nummer 3 plaats je op de min van de power. De installatie is nu klaar.
Als je het systeem nu inschakelt zie je dat alle instrumenten gewoon werken.
De ACU is nu uit omdat de drive niet is aangesloten.
Zodra je de stekker van de drive aansluit, gaat de ACU aan en wordt automatisch de roerstand aangegeven.
Nu moet je eenmalig door het kalibratie proces.
Kalibratie proces:
6. Kies Menu / Instellingen / Stuurautomaat kalibreren / inbedrijfstelling / Havenwizard / ok / Helmstok / Doorgaan
7: Nu krijg je de melding “Zet het roer midscheeps en druk op OK”. Dat kun je met een 9Volt batterij doen. Klik met het roer in de middenstand op ok.
Door de 2 draden van de 9Volt batterij(nr.11) op A en B van de motor te plaatsen zal de roerstang uitschuiven, gebeurt dit niet, draai de 2 draadjes dan om (door het wisselen van de 2 draadjes veranderd de richting van de motor)
8: Vervolgens krijg je de melding “Verplaats het roer helemaal naar BAKBOORD”
Je moet naar bakboord “sturen”, dat betekent dat als de drive aan stuurboord is bevestigd, je hem geheel moet intrekken. De helmstok beweegt dus naar stuurboord, maar je stuurt naar bakboord!
De drive stopt zelf op de uiterste stand en klik dan op “ok”
9: Vervolgens krijg je de melding “Verplaats het roer helemaal naar STUURBOORD”. Verplaats het roer volledig naar de andere kant tot hij zelf stopt en druk op “OK”
10: Vervolgens krijg je weer de melding “Zet het roer midscheeps en druk op OK”
11: Nu krijg je de melding “Taak voltooid succesvol”, kies “Doorgaan”. Nu wordt de roerlimit weergegeven die staat altijd op 28 graden “Roerlimit is bijgewerkt”, gewoon laten staan (niet veranderen) en op “Doorgaan” klikken.
Nu gaat hij het roer testen. Het roer zal niet naar de uiterste standen gaan maar dat moet je nu negeren. Gewoon de testen laten uitvoeren en instructies volgen.
12: Je krijgt vervolgens weer de melding “Taak voltooid succesvol”. Kies “Doorgaan”. Je komt nu terug in het menu op Havenwizard, 1 keer “annuleren” klikken (= terug). Kies dan Aandrijfinstellingen/Roerlimiet en verhoog die naar 40 graden!
Door dit kalibratie proces zal je stuurautomaat de hele range gebruiken. Kies opslaan en klik op “Standby” om naar het hoofddisplay terug te keren.
De stuurautomaat is nu gereed voor gebruik.
Afbeelding 1:

Schema 1:

Schema 2:


Specificaties
Product specificaties:
Voltage: 12VDC
Stroomverbruik: 0A (standby), 5A max.
Uitslag: 300mm (12inch)*1
(*1: Doordat Pcnautic een 50mm grotere slag heeft kan in extremere omstandigheden gevaren worden t.o.v. van de concurrentie)
Roer Kracht: 85kg (187lbs) *2
(*2: Roerkracht is de fictieve kracht die “rudder force” genoemd wordt door de concurrentie zoals Raymarine en Simrad)
Statische Kracht: 200kg *3
(*3: De Pcnautic drive kan niet door de roerkracht in of uitgeschoven worden, hierdoor kan hij grotere en zwaardere schepen en/of omstandigheden in bedwang houden t.o.v. de concurrentie)
Vol roer bij 250mm: 4 sec.
Max. Boot Gewicht: >6000kg (13200lbs) *4
(*4: Door de interne roerstand i.c.m. de langere slag en statische kracht is de Pcnautic Drive in staat grotere schepen en/of in zwaardere omstandigheden de schepen op koers te houden t.o.v. de concurrentie)
Reviews
Op het Zeilersforum zijn verschillende reviews en toepassingen te vinden onder andere onder verschillende topics:
Raymarine Q047 Replacement met roerstandgever
Autopilot Tiller Drive icm Pypilot controller
Zie voor reviews ook ons YouTube kanaal:




